Berührungsempfindlicher Drehknopf
Es wird ein Drehknopf, der durch kapazitives Abtasten die Bewegung eines mit signalauslösenden Rippen versehenen Rings erkennt, vorgeschlagen. Die Verbraucher sind an einem Knopf mit integrierter Benutzeroberfläche interessiert.


Technischer Lösungsvorschlag A2015-009
Unternehmenseinheit: Diehl AKO Stiftung & Co. KG
Beschreibung:
Es wird ein Drehknopf mit kapazitiver Abtastung vorgeschlagen, der die Bewegung eines Indexrings erkennt.
Die Verbraucher sind an einem Drehknopf mit integrierter Benutzerschnittstelle interessiert. Vorzugsweise sollte dieser Drehknopf drehbar sein. Außerdem wird ein Drehknopf mit Metalloptik und -haptik bevorzugt, da er ein edles Aussehen hat.
Diese Erfindung bietet einen großen Drehknopf mit Anzeigeelementen in der Mitte und der Abtastbewegung des Drehknopfes aus Metall. Das vorgeschlagene System ist vollständig abgedichtet und wasserdicht. Die Abtastung der Drehbewegung wird durch einen zylindrischen kapazitiven Kleinwinkelsensor realisiert. Für die Abtastung werden minimale Sensoren, ein oder zwei, verwendet, im Gegensatz zu einer Anordnung von Sensoren. Bei der kapazitiven Abtastung des Drehindexes muss der Sensor ein Zylinder oder Bogen sein.
Bislang wurde die Bewegung eines Metallrings mit optischen Sensoren erfasst. Eine andere Methode verwendet mechanische Taster, die über ein Zahnrad mit dem Ring verbunden sind. Es wurden kapazitive Erfassungsmethoden vorgeschlagen: Verwendung einer Reihe von Sensoren, die unter dem Knopf und einem einzigen Index angebracht sind. Die Anbringung einer Reihe von Sensoren um den Innenzylinder des Rahmens ist recht teuer.
Das vorgeschlagene System ist billiger und einfacher als optische, mechanische und kapazitive Array-Systeme. Die optischen und kapazitiven Array-Systeme lassen sich nur schwer versiegeln, die mechanischen jedoch nicht. Das kapazitive Array ist zwar sehr ähnlich, aber wegen der Kosten und der Komplexität der Aufbringung der vielen Sensoren auf der Innenseite eines Zylinders schwer zu realisieren.
Diese Erfindung erfasst die Bewegung eines Metallrings, der sich um einen Anzeigeknopf dreht, mit Hilfe eines kapazitiven Schiebersensors. Dies geschieht durch eine kreisförmige Anordnung von Indizes um den Metallring in Kombination mit einem zylindrischen Bogen kapazitiven Schieberegler-Sensor. Dadurch entsteht ein System, bei dem die Metallindizes immer parallel zum Sensor liegen. Dieses System kann in großen Ringen verwendet werden und das System kann vollständig abgedichtet werden und ist wasserdicht. Das Innovative an dieser Erfindung ist die Verwendung eines kapazitiven Schiebersensors zum Erfassen der Bewegung eines Zylinders und das Verfahren zur Herstellung eines kapazitiven Zylinderbogensensors.
Weitere Merkmale und Vorteile der Erfindung ergeben sich aus der folgenden Beschreibung, die anhand von Beispielen für bestimmte, nicht einschränkende Ausführungsformen unter Bezugnahme auf die beigefügten Zeichnungen gegeben wird, in denen:
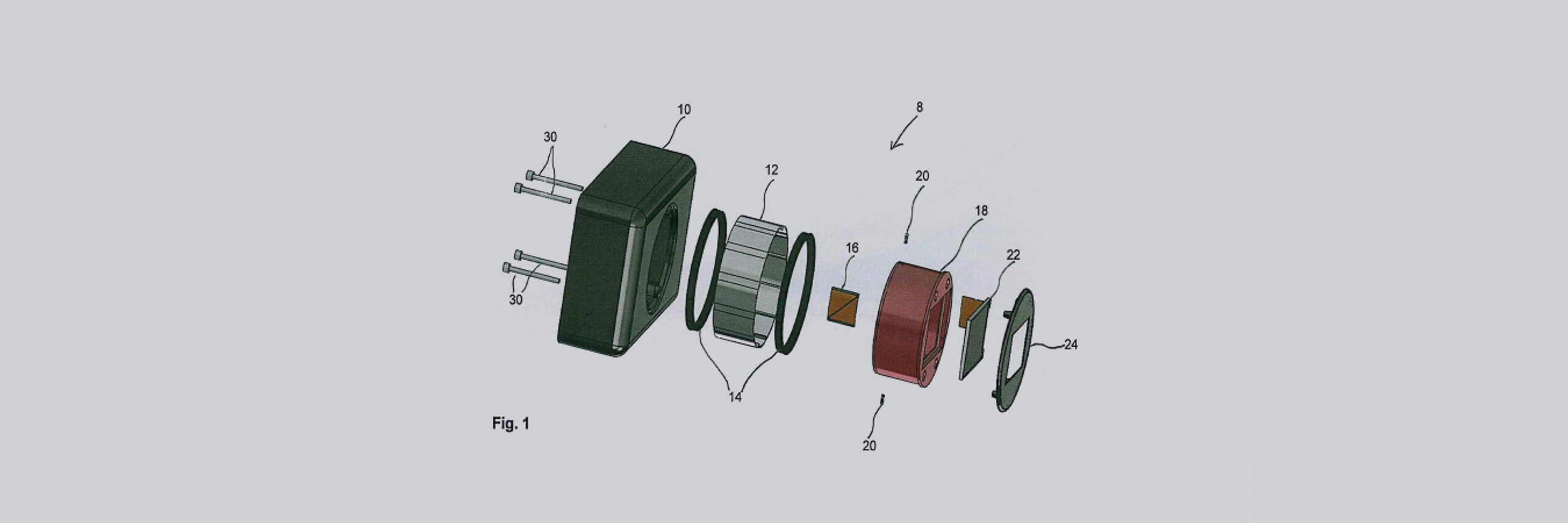
- Fig. 1 zeigt eine Explosionsdarstellung eines Metallknopfes mit kapazitiver Abtastung,
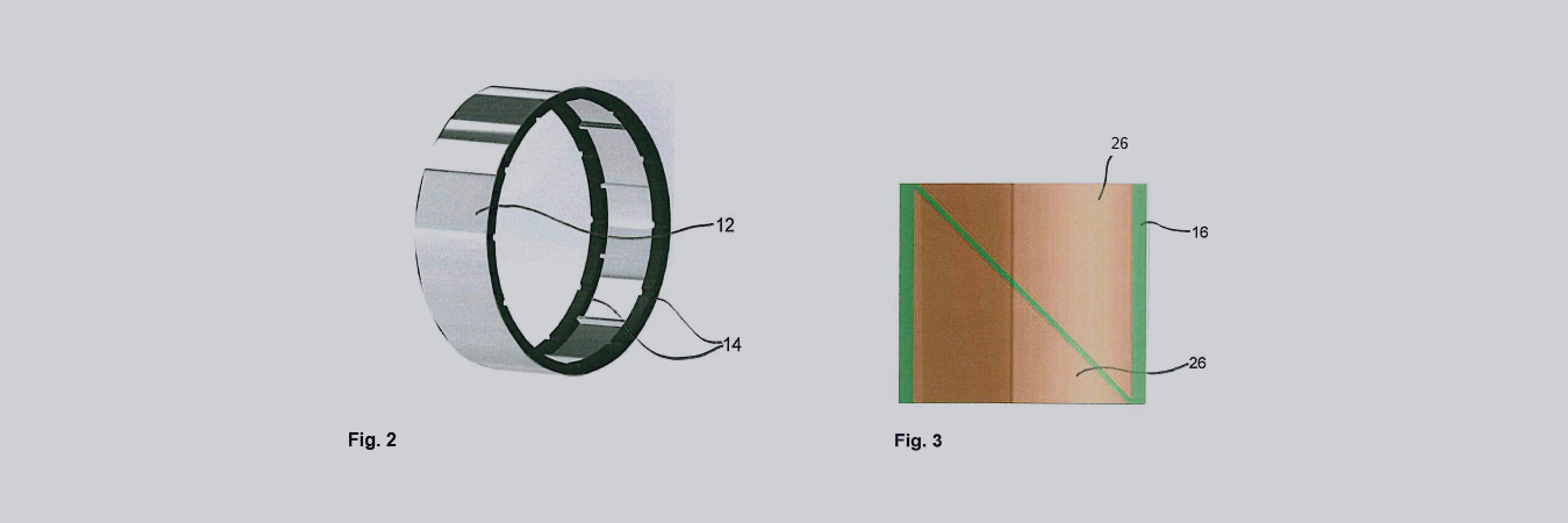
- Fig. 2 zeigt einen Metallring mit Führungsringen,
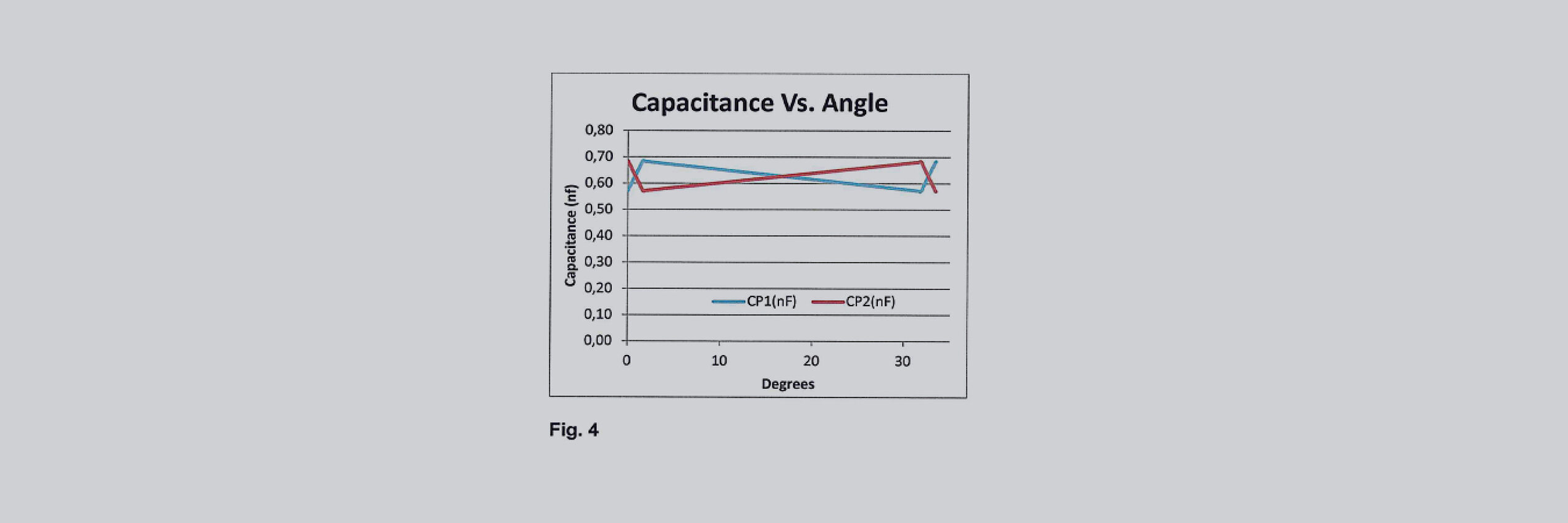
- Fig. 3 zeigt eine kapazitive Abtastung, die durch zwei dreieckige Sensoren durchgeführt wird,
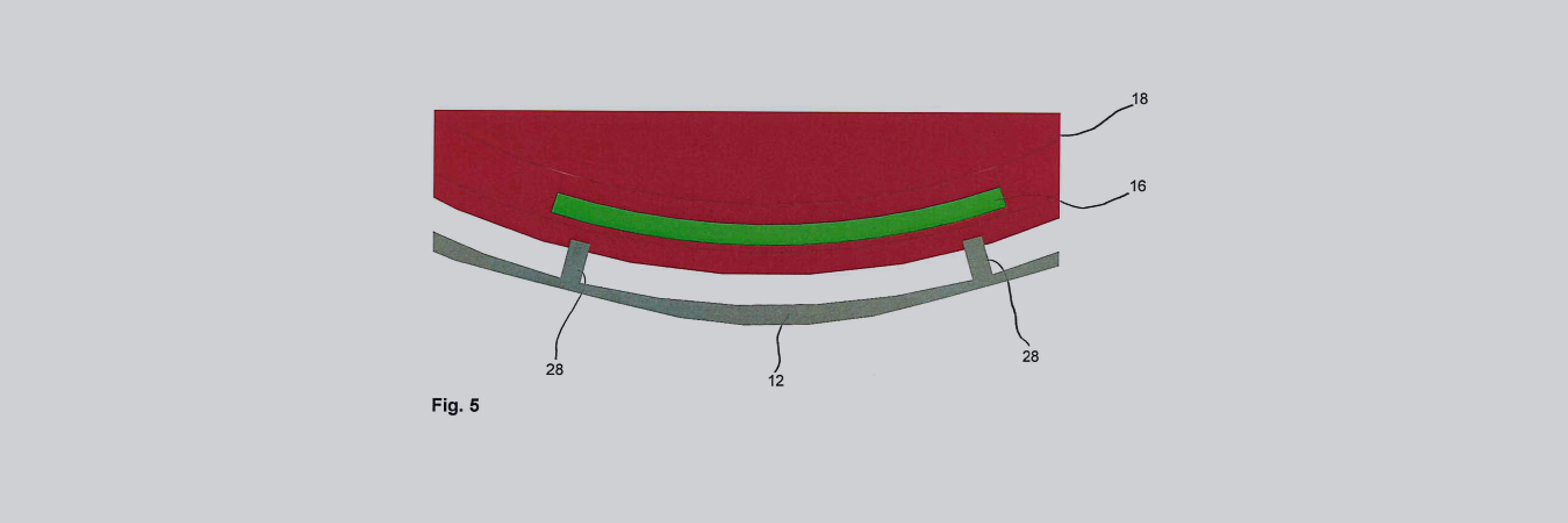
- Fig. 4 zeigt die Sensorsignale der beiden dreieckigen Sensoren, während die Strangpressprofile über die Sensoren laufen, und
- Fig. 5 zeigt die Leiterplatte parallel zu dem Metallring mit zwei Strangpressprofilen.
In Fig. 1 sind die Komponenten eines Metallknaufs 8 mit kapazitiver Abtastung dargestellt, nämlich ein Sockel 10, ein stranggepresster Metallring 12 mit zwei Führungsringen 14, eine kapazitiv abtastende Leiterplatte 16 zum Einsetzen in den Rahmen 18 mit Kugeldellen 20, ein TFT-Display 22 und eine Linse 24. In diesem Beispiel sind die Komponenten mit Schrauben 30 befestigt.
Die in Fig. 2 gezeigte Konstruktion ist ein 80-mm-Knopf 8. Das System hat nur drei bewegliche Teile. Den Metallring 12 und zwei Kunststoff-Führungsringe 14. Die Führungsringe 14 zentrieren den Metallring 12 und dienen als Lager. Falls erforderlich, kann ein Kunststoff mit geringer Reibung verwendet werden, um ein sanfteres Drehen zu ermöglichen. Die Einkerbungen in den Kunststoffringen 14 sorgen zusammen mit den Kugeldellen 20 für die haptische Rückmeldung. Diese können auf die Anzahl der Anschläge und das Gefühl abgestimmt werden.
Der Metallring 12 kann aus rostfreiem Stahl gefertigt sein. Ein solcher Ring sieht besser aus und fühlt sich besser an als Kunststoff. Darüber hinaus ist es möglich, Ringe mit großen Abmessungen herzustellen.
Die Verwendung von stranggepresstem Aluminium hat jedoch viele Vorteile:
- Keine Beschränkung auf runde Noppen.
- Komplexe Geometrien wie z. B. das Hinzufügen von Fingermulden sind möglich.
- Bestehende Lieferanten von stranggepressten Aluminiumkühlkörpern können kostengünstig produzieren.
- Viele verschiedene Oberflächen sind möglich, einschließlich anodisierter Farben.
- Das kapazitive System erkennt kleine, gleichmäßig um das Innere verteilte Extrusionen.
Der Metallring 12 könnte aus rostfreiem Stahl hergestellt werden. Ein solcher Ring hat ein besseres Aussehen und eine bessere Haptik als der Metallring 12. Die kapazitive Abtastung wird durch einen oder zwei dreieckige Sensoren 26 (Fig. 3) erreicht. Es handelt sich um Sensorextrusionen 28 im Metallring 12. Diese sind in der gezeigten Ausführung um 30° voneinander beabstandet. Wenn sich der Ring 12 dreht, fahren die Profile 28 an den Sensoren 26 vorbei. Wie in Fig. 4 zu sehen ist, nimmt das Signal eines Sensors 26 zu, während das Signal des anderen abnimmt. Mit diesem System können wir erkennen:
- Richtung
- Geschwindigkeit
- Relative Position innerhalb des Winkels.
- Ob eine Hand auf dem Drehknopf liegt (Näherungserkennung).
Die Sensoren 26 müssen annähernd parallel zu den Metallindizes 28 liegen, damit sie richtig funktionieren. Aus diesem Grund muss eine gebogene Leiterplatte 16 verwendet werden. Die kapazitive Abtastung des Rings 12 bietet die Möglichkeit, die Richtung der Ringbewegung und die relative Position des Rings 12 zu erfassen.
Wir schlagen eine Standardplatine 16 anstelle einer flexiblen Platine vor. Die Abtastung kleiner Winkel hat mehrere Vorteile:
- Es kann eine kleine Standardleiterplatte verwendet werden.
- Es besteht keine Notwendigkeit, eine flexible Leiterplatte ganz um den Knopf zu wickeln, oder andere komplexere Geometrien.
- Die Leiterplatte kann eingepresst werden, so dass keine Befestigungselemente erforderlich sind.
- Dazu wird eine Tasche in den Rahmen gebohrt und eine ~0,5 mm dicke Leiterplatte verwendet.
- Die Leiterplatte wird gezwungen, sich beim Einsetzen in die Tasche zu biegen.
- Die Kraft, mit der die Leiterplatte versucht, sich aufzurichten, hält sie in der Tasche fest.
- Dies hat den zusätzlichen Vorteil, dass die Sensoren und die Metallprofile parallel gehalten werden (siehe Fig. 5).
Durch den großen Hohlraum in der Mitte des Knopfes 8 und die geschlossene Bauweise ergeben sich viele Anzeigemöglichkeiten. Durch den großen Raum im Knopf 8 bzw. hinter der Vorderseite des Knopfes 8 sind komplexe Anzeigen 22 möglich. Die Mitte kann mit Elektronik und Display oder mit vielen Lichtleitern und LEDs gefüllt werden.
Das gezeigte Design ist mit einem handelsüblichen 2,4"-TFT-Display 22 konfiguriert. Die Größenbegrenzung des TFT-Displays 22 ist etwa 5 mm kleiner als der Durchmesser des Knopfes 8.
Die Frontlinse 24 kann mit einer beliebigen Kombination aus kapazitiven Berührungstasten und/oder einem Bildschirm konfiguriert werden. Die Berührungstasten können in die Frontlinse 24 integriert werden. Bei der in Fig. 1 gezeigten Konstruktion wird die Linse 24 zusammen mit vier Schrauben 30 verwendet, um das System zusammenzuhalten. Um dies zu vermeiden, kann die Linse 24 auch auf die Vorderseite geklebt werden.
Die Kunststoff-Führungsringe 14 bieten viele Möglichkeiten der haptischen Rückmeldung. Zum Beispiel:
- Kugeldelle
- Plastikfeder
- Delta-Feder
Das aktuelle Design verwendet ein System mit einer Kugeldelle 20, die sich auf beiden Seiten des Rings 12 befindet. Dieses System ist in hohem Maße anpassbar, da sowohl das Gefühl als auch die Anzahl der Positionen konfigurierbar sind. Zum Beispiel durch Änderung der Anzahl und Stärke der Kugeldellen 20.
Die Kraft, mit der der Ring 12 gedreht wird, d. h. die Reibung, kann ebenfalls eingestellt werden. Es ist jedoch noch nicht klar, ob Kunststoff mit geringer Reibung verwendet werden muss.